In Fall 2023, as part of a haptics class at UCSD, our team developed a 1 Degree of Freedom (1-DoF) Motorcycle Simulator. We aimed to create a realistic and immersive experience by simulating the physical feedback of riding a motorcycle during acceleration and braking, enhanced by a virtual environment. The simulator combines mechanical design with haptic feedback to replicate the forces and motions a rider typically encounters. Through this project, I gained valuable insights into the complexities of haptic technology and its role in creating more engaging simulations.
Experience realistic motorcycle riding with our 1-DoF Simulator, which combines haptic feedback and virtual environment to deliver immersive, responsive riding sensations
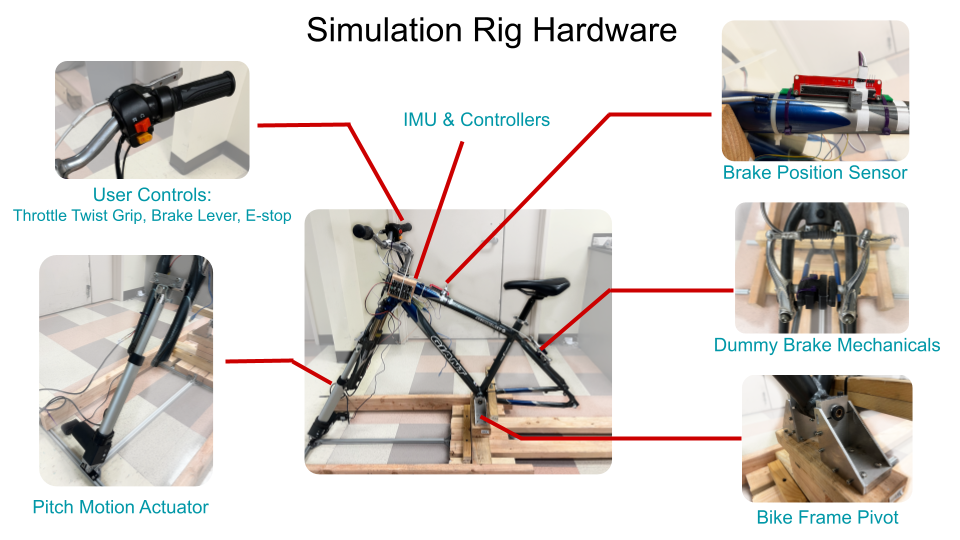
Hardware Overview
The 1-DoF Motorcycle Simulator features user controls including a twist-grip throttle from an E-bike, brakes, and an E-stop switch. The braking system uses a block attached to the rear brake pad to mechanically simulate braking, with a slide potentiometer on the brake cable to measure braking input. An IMU, motor controller, and Teensy 4.1 microcontroller are mounted near the handlebars. The throttle grip and brake cable potentiometer provide position data, which is fed into a custom motorcycle physics model running on the microcontroller.
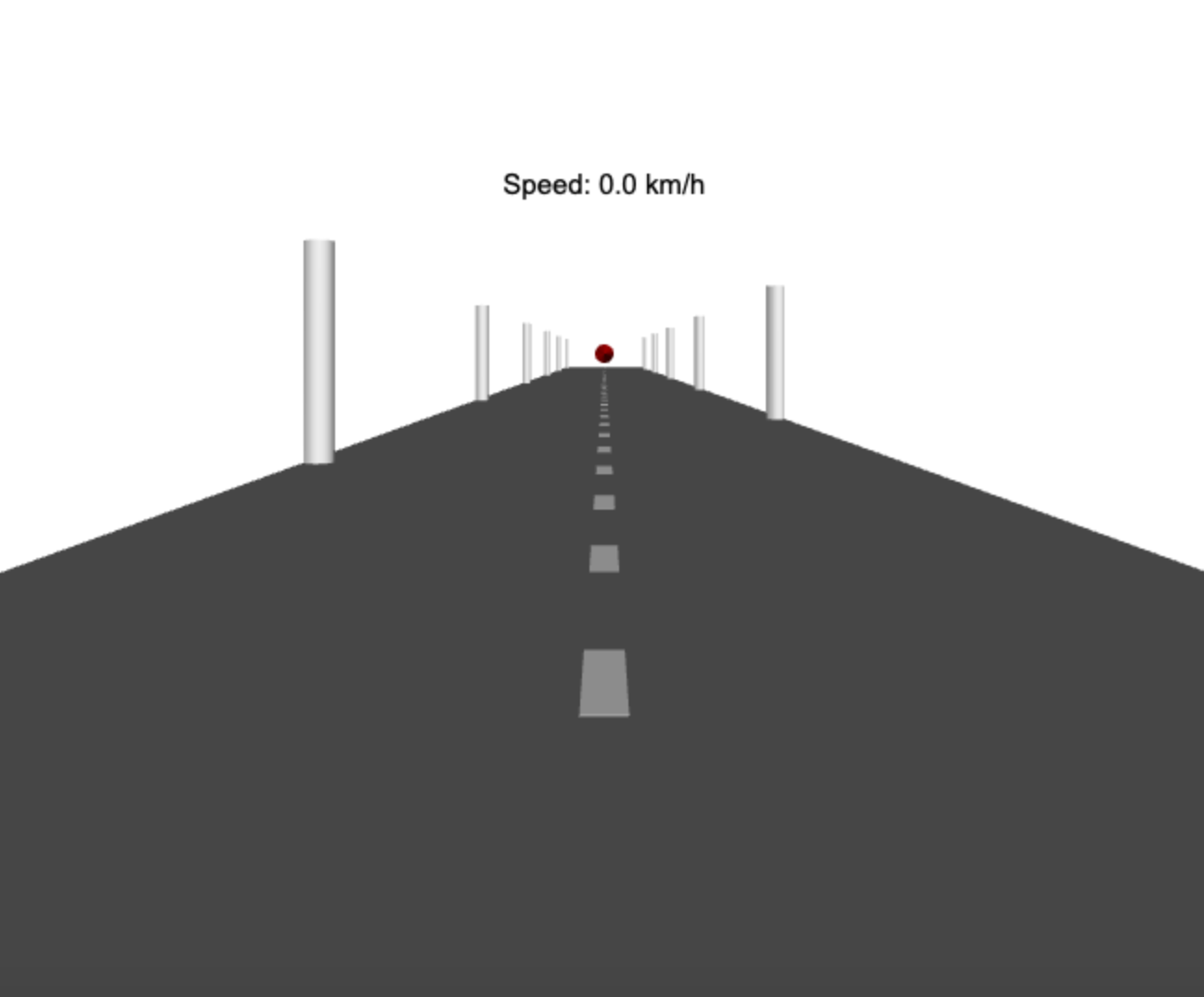
Virtual Environment
The physics simulation data is integrated into a VPython-based virtual environment, where a long rectangular cuboid represents the road, thin cuboids for road lines, cones for traffic obstacles, and cylinders for bumps. The camera in the virtual environment mirrors the motorcycle’s position and pitch angle, with added reference dots to indicate the user’s view and pitch angle.
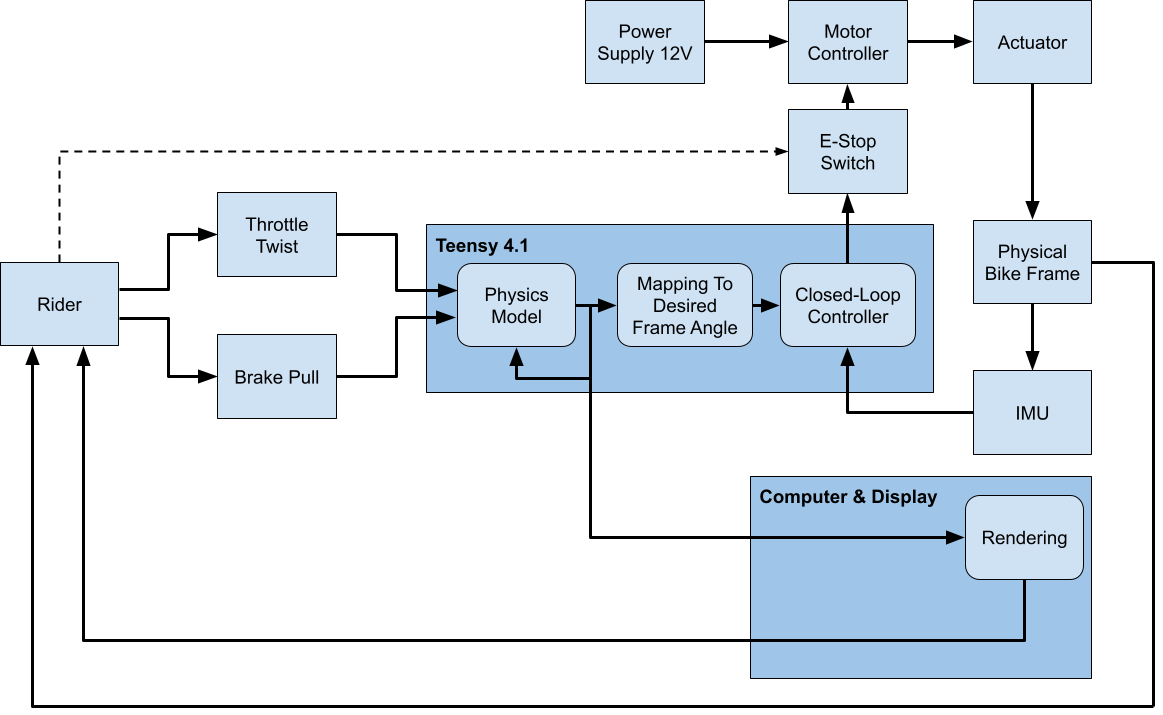
Block diagram of the motorcycle simulator
Video Demonstration
Our Final Report
We were featured in this Instagram post by ucsdmae!