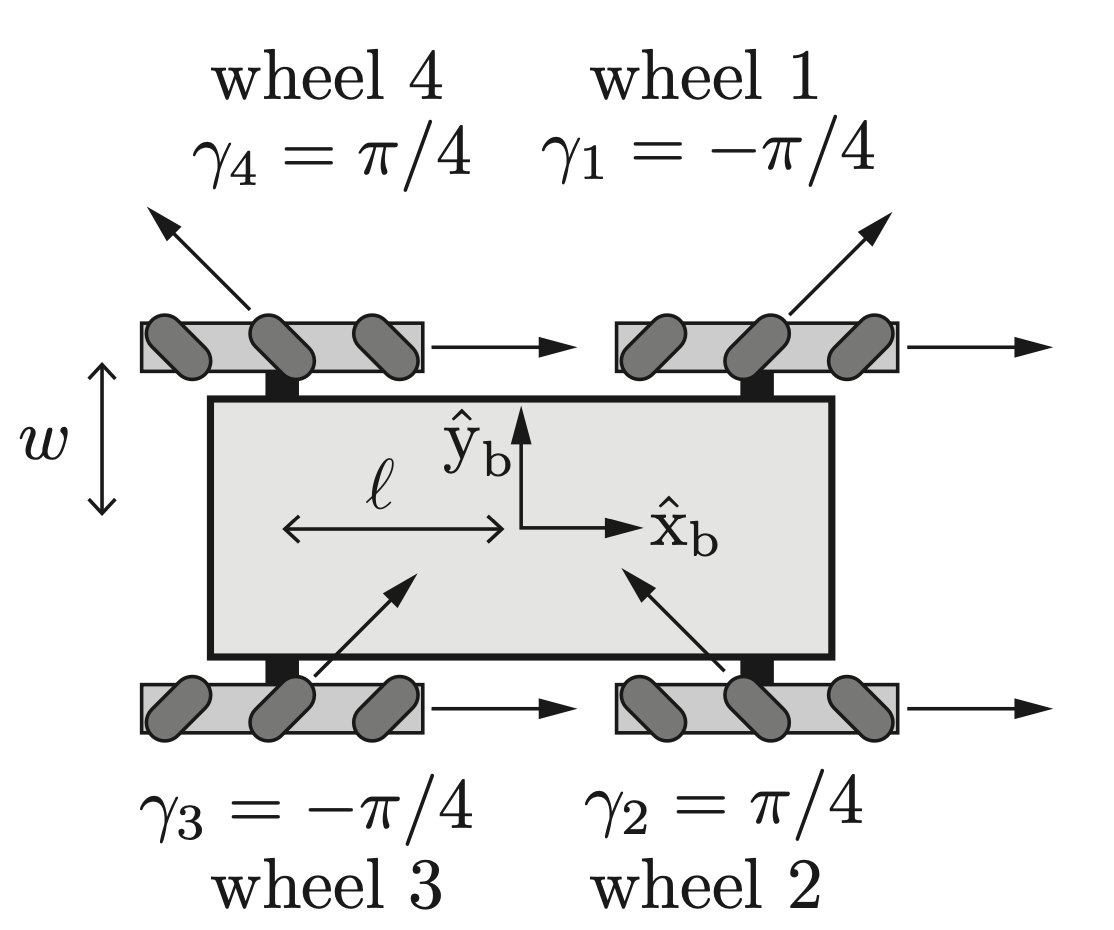
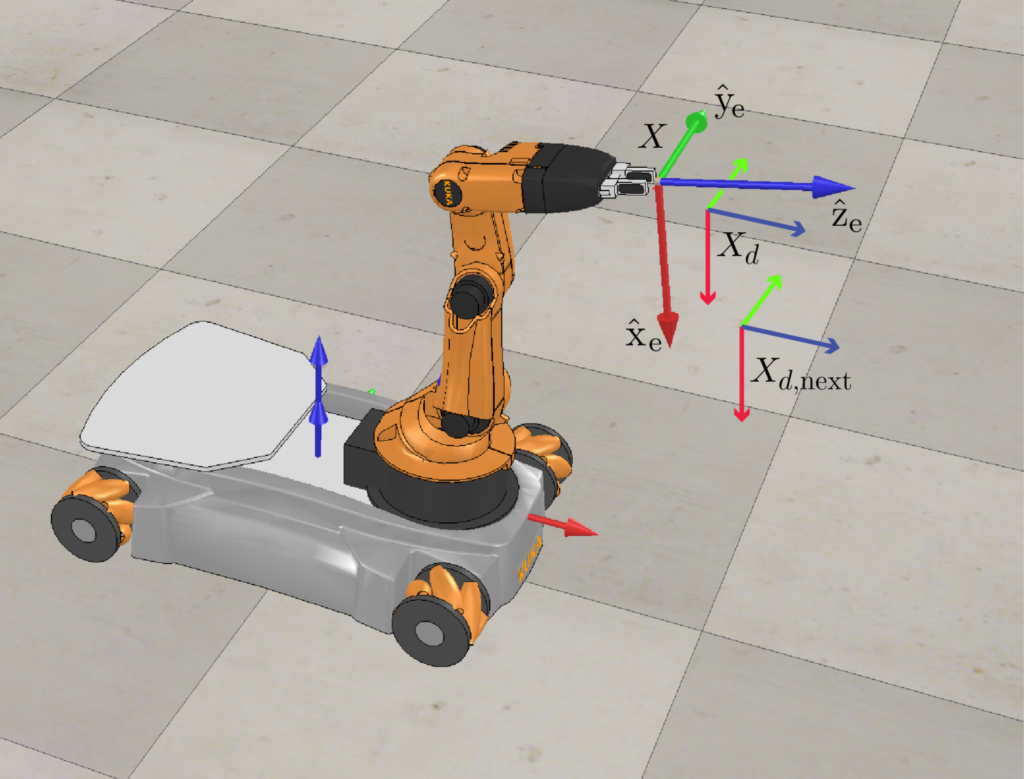
The kinematic model of the mobile robot with four Mecanum wheels is:
\[
\begin{bmatrix}
u_1 \\
u_2 \\
u_3 \\
u_4
\end{bmatrix}
= \frac{1}{r}
\begin{bmatrix}
-l – w & 1 & -1 \\
l + w & 1 & 1 \\
l + w & 1 & -1 \\
-l – w & 1 & 1
\end{bmatrix}
\begin{bmatrix}
\omega_{bz} \\
v_{bx} \\
v_{by}
\end{bmatrix}
\]
where \(u_1, u_2, u_3,\) and \(u_4\) are the speeds of the four wheels, and \(\omega_{bz}, v_{bx}, v_{by}\) are the angular velocity and linear velocities of the robot. To move in the \(+\hat{x}_b\) direction, all wheels drive forward at the same speed. To move in the \(+\hat{y}_b\) direction, wheels 1 and 3 drive backward, and wheels 2 and 4 drive forward at the same speed. To rotate counterclockwise, wheels 1 and 4 drive backward, and wheels 2 and 3 drive forward at the same speed.